The Problem
With the increasing demand for healthcare workers in recent years, there is an increased interest in healthcare automation. How might AI and machines be used to provide care for facilities that are at capacity and understaffed?
We decided to explore how we can help at-risk elderly patients who may need emergency medical assistance through the night.
Our Solution
We set out to design a robot that could passively monitor the vital signs of a patient and detect potential anomalies. It was important that this robot would be non-intrusive and fit into a comfortable form factor.
It was important to us that our robot had some kind of movement so that it could provide physical feedback and comfort. After some initial sketches, we settled on three different form factors: a lion, a dolphin, and a Waddle Dee.
I was in charge of the lion's design.
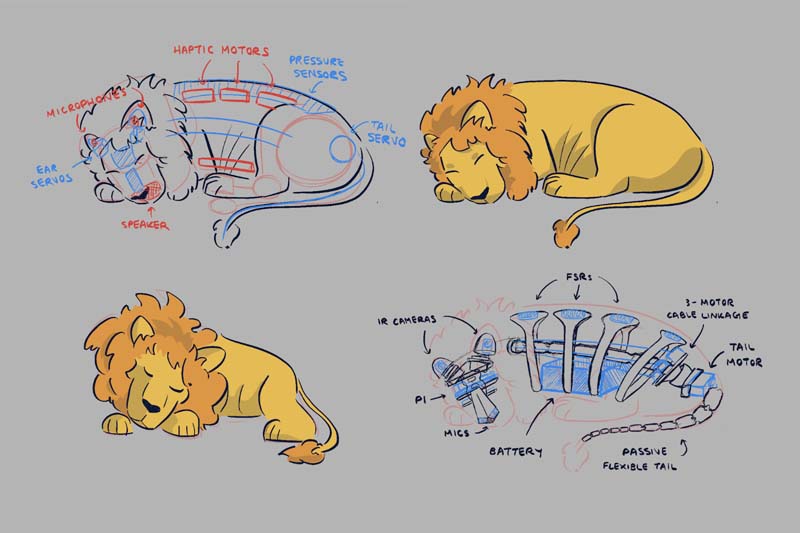

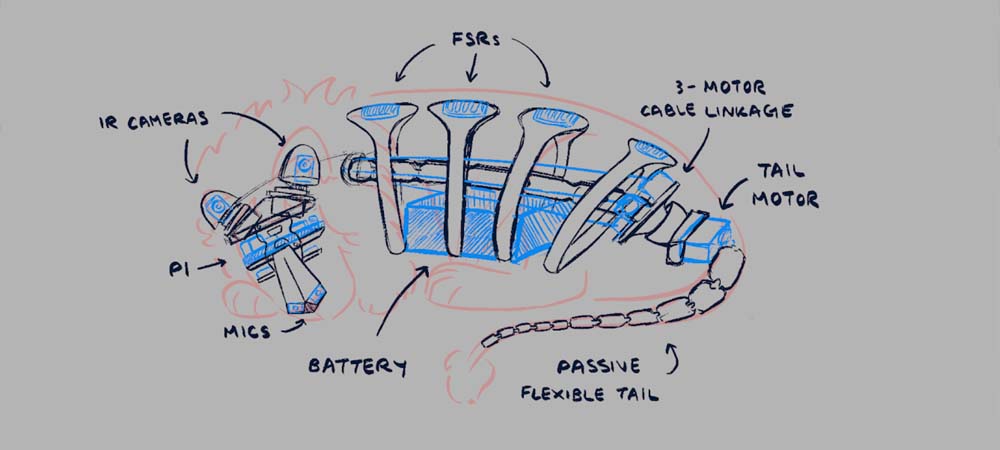
We decided to embed a thermal camera, microphone, speaker, and servo motors placed to mimic some natural motion. The dolphin and Waddle Dee would mimic breathing, while the lion would mimic purring.
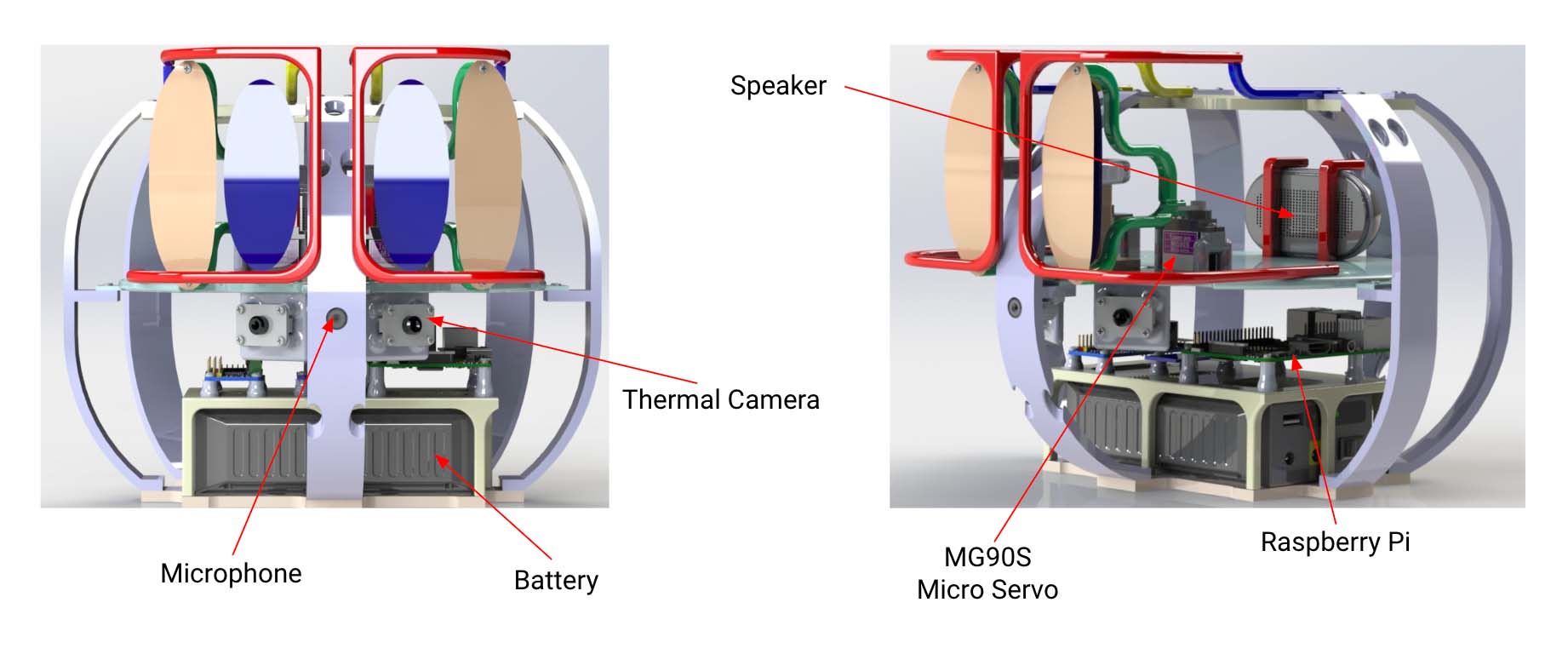

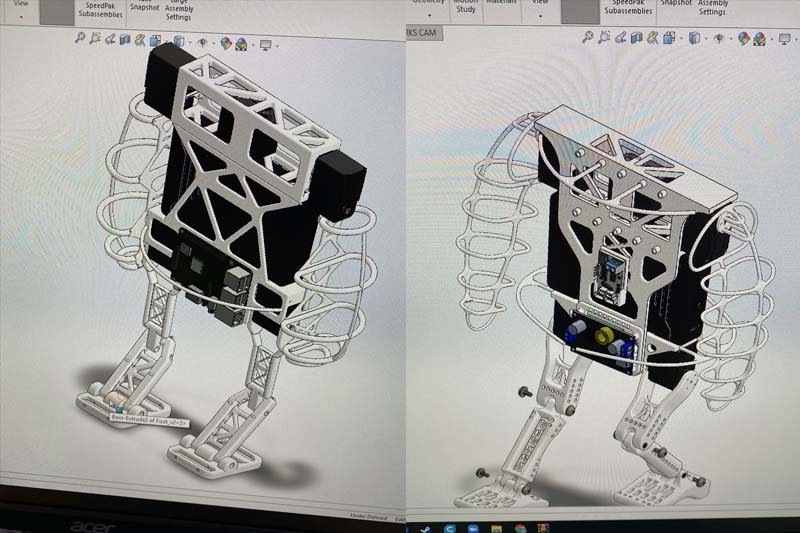
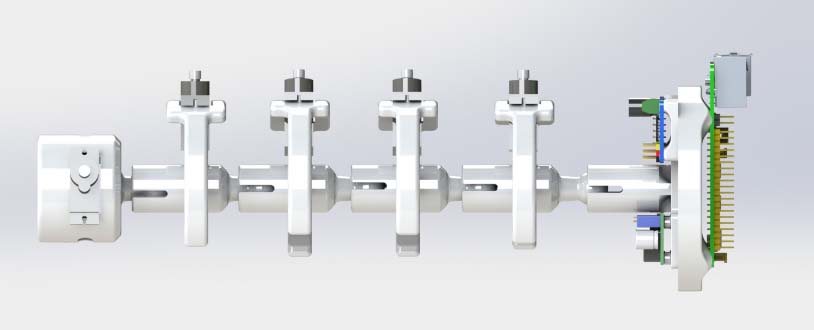
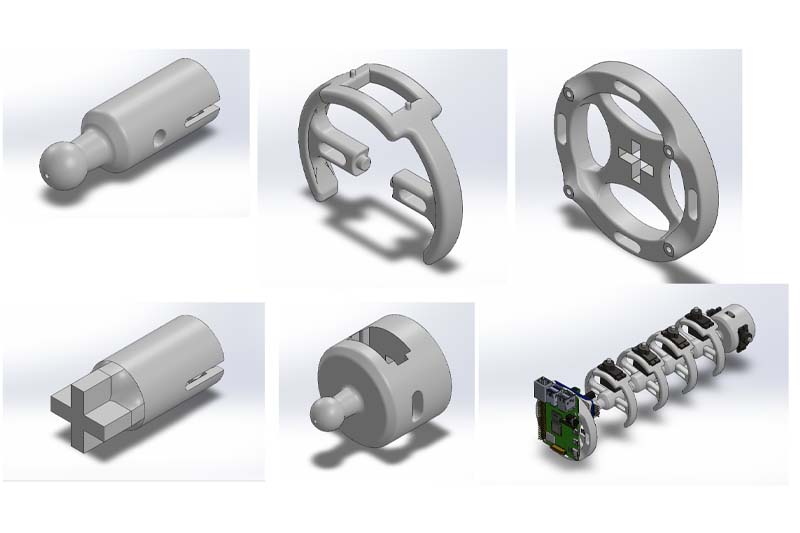
For the lion, I tried to make the components as lightweight as possible. I went with a "skeleton" design, where a flexible spine had "ribs" attached with servo motors for haptic feedback. The electronic components would be housed at the base of the spine while the remaining sensors would be embedded in the lion's head.

Project Evolution
While we were able to prototype the animals, our advisor pushed us to embed these systems into a pillow. This time, the goal was comfort.
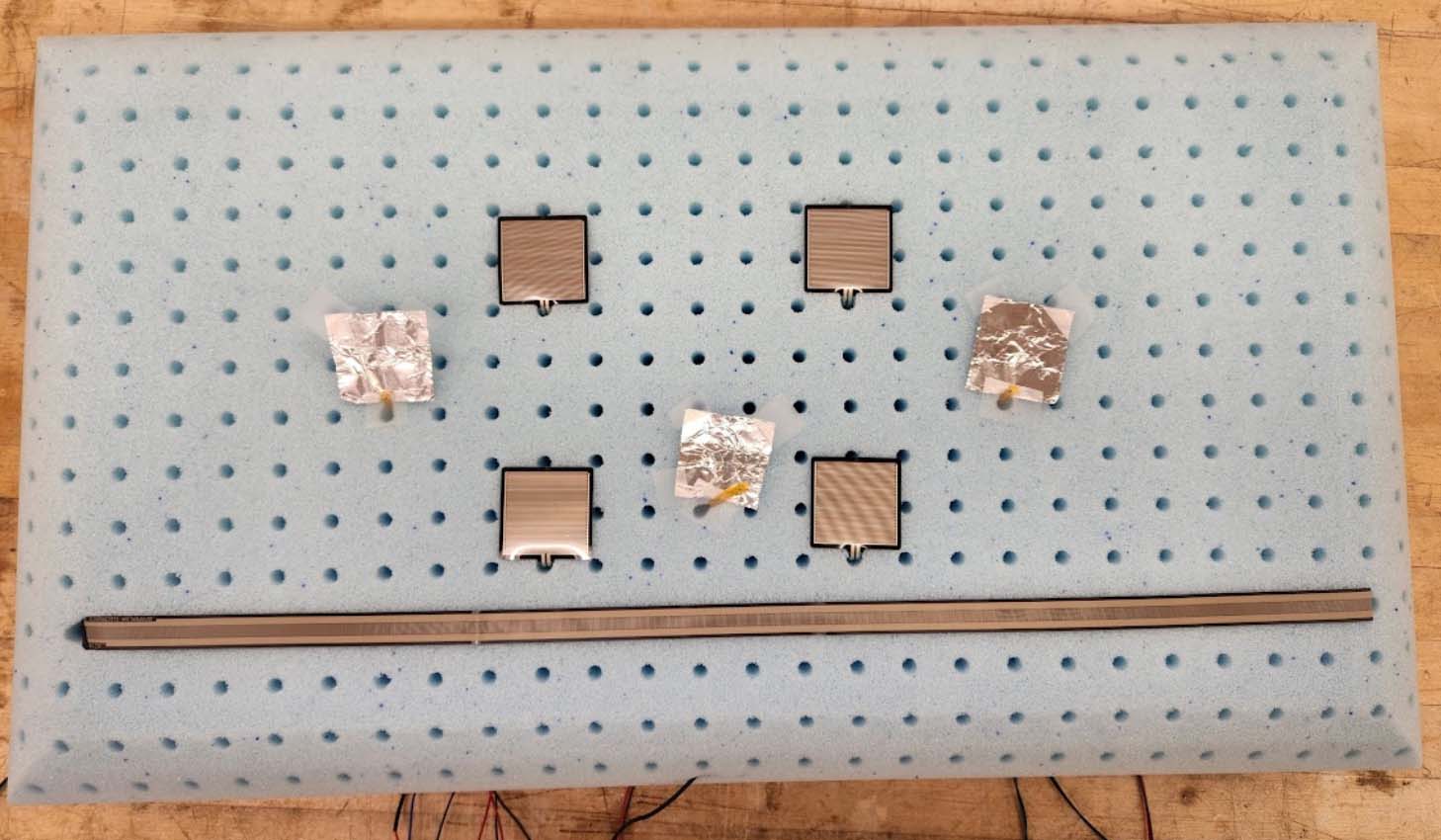
We added force-sensitive resistors (FSRs) to detect human presence on the pillow, thermistors to detect temperature, and a contact microphone. These were all embedded into a memory foam pillow.
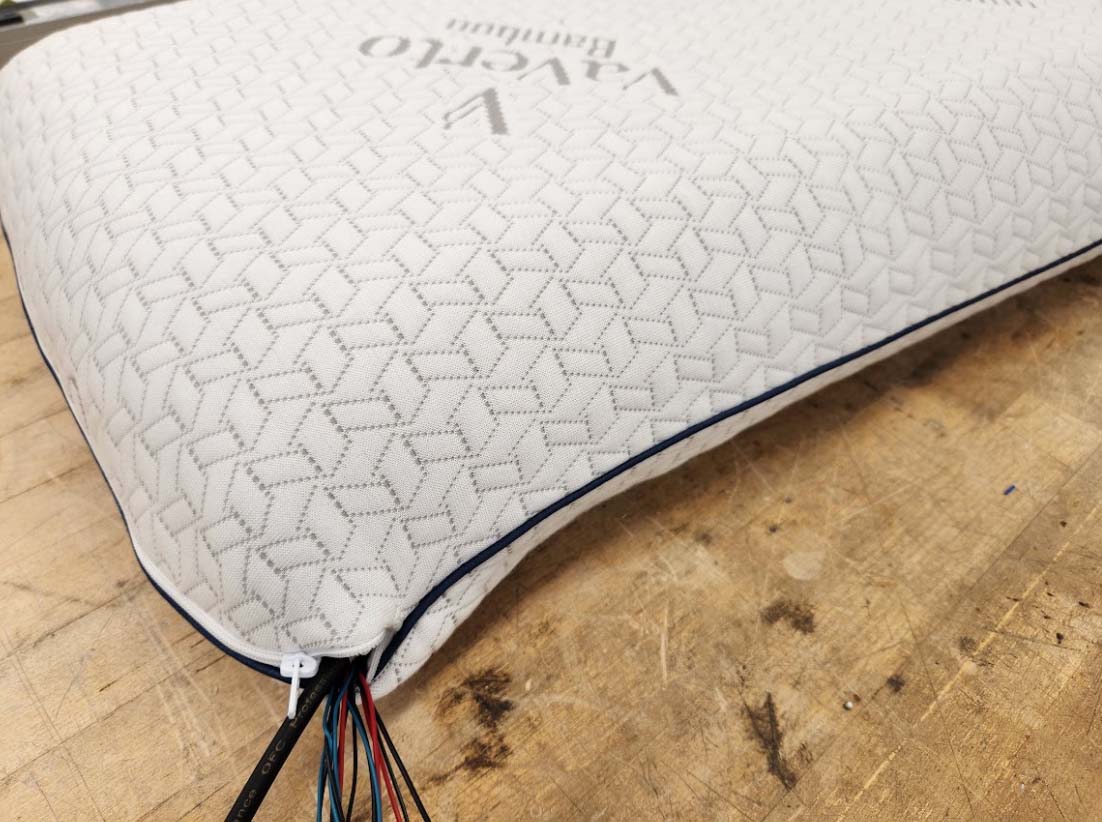
Using a data aquisition board (DAQ) we recorded the analog voltage changes from the sensors. This project will be continued by future students in the lab to optimize an algorithm to interpret the data.