The Problem
We were tasked with creating the fastest bipedal robot possible using eight servo motors, a battery, and a Raspberry Pi.
We were responsible for the approach, modeling, manufacturing, programming, and testing at each stage of the design process.
Our Solution
We took inspiration from Big Hero 6's Baymax for two reasons: first, his design naturally hides a mechanical frame within a soft, approachable exterior; and second, because Baymax is a prime example of how robotics can be used for accessibility and healthcare.
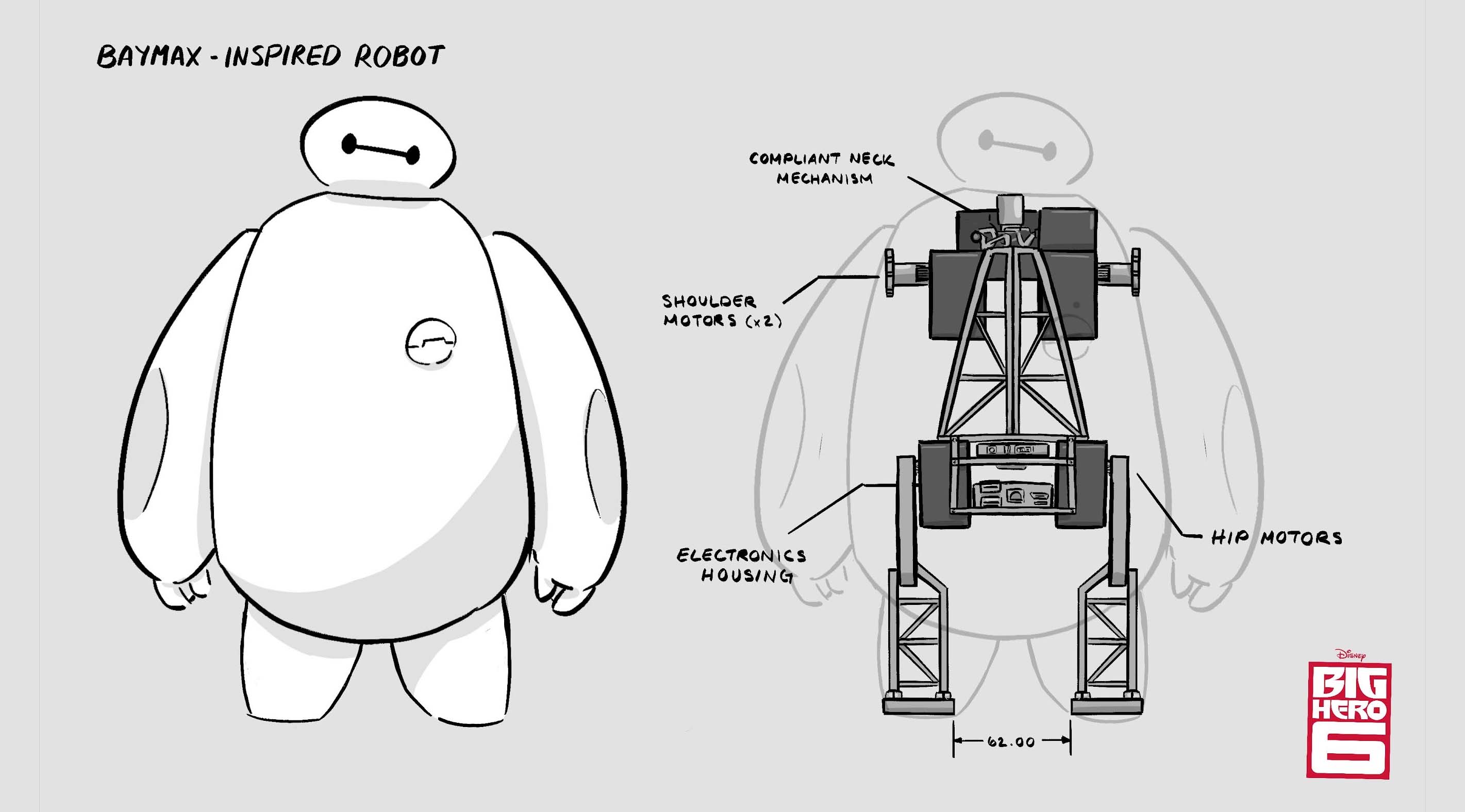
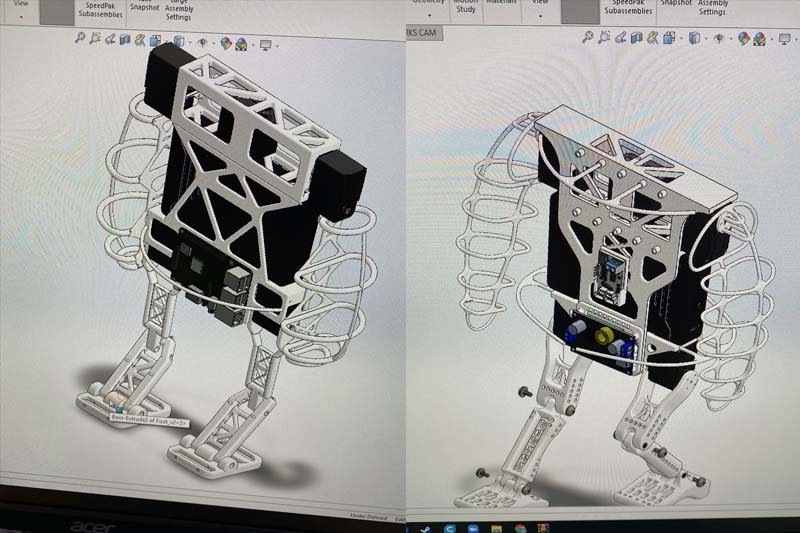
Our design philosophy was to make each limb as lightweight as possible. The skeleton-like design was to minimize mass while maximizing stiffness. If time had permitted, the skeletal frame would also facilitate the addition of a vinyl "skin" coating.

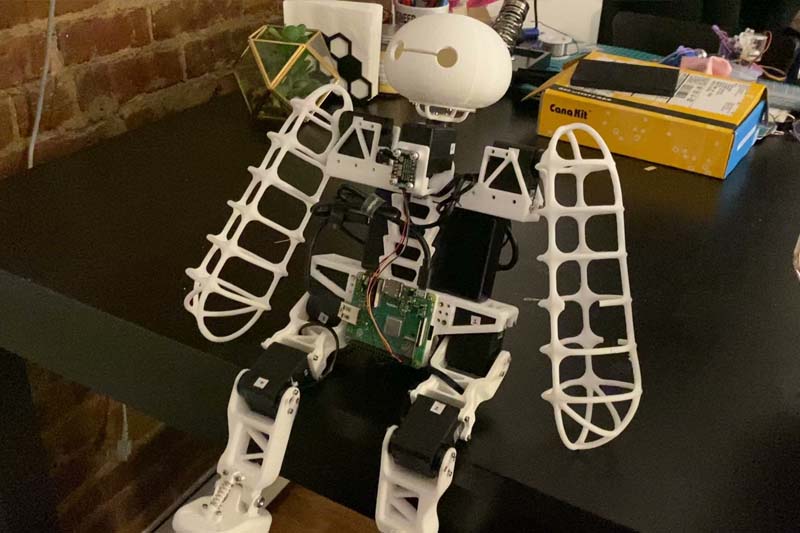
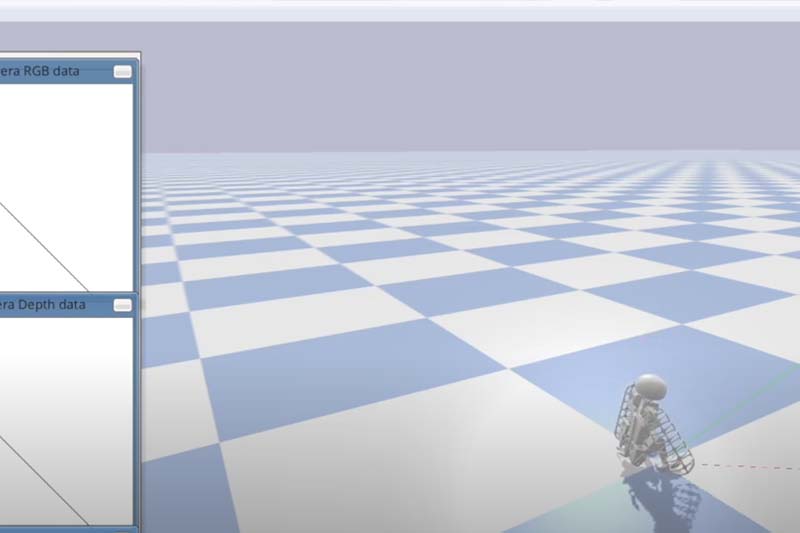
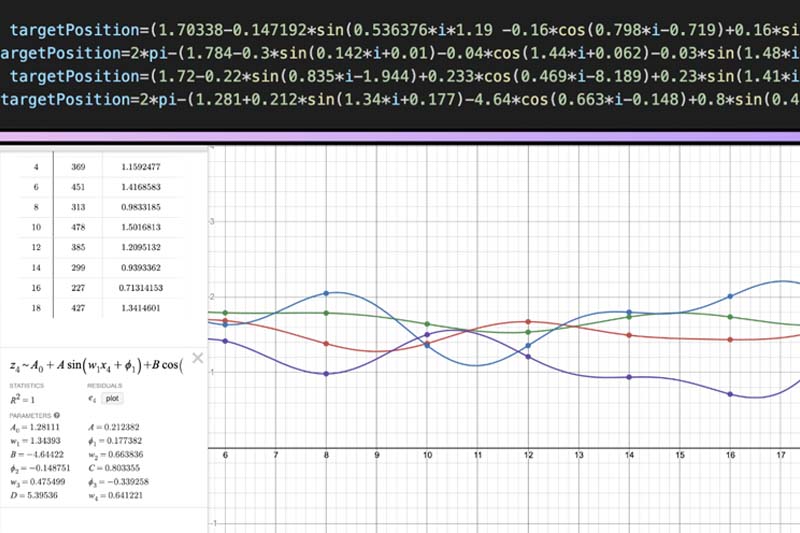
To actuate the robot (affectionately dubbed "Slaymax") we used inverse kinematics to figure out the best angle position functions for each joint. We also explored using a hill-climber algorithm to simulate the best parameters for a successful walk cycle.
Take a look at our final project video here!
What We Learned
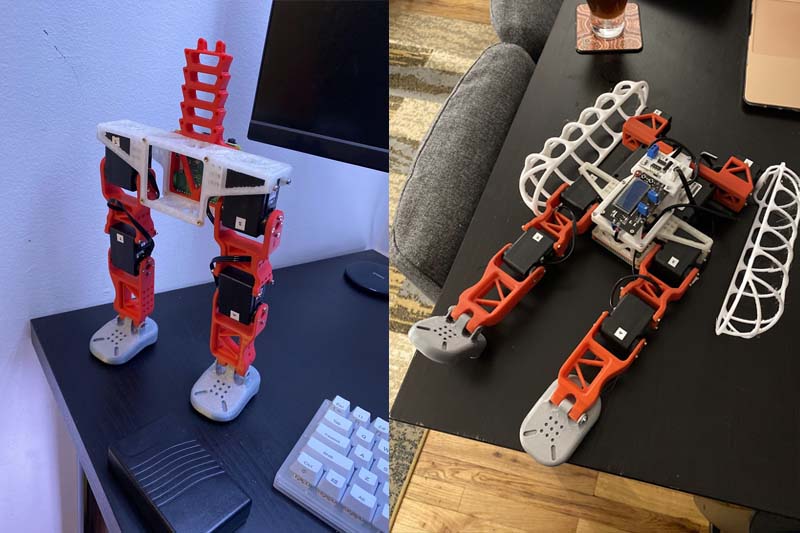
Our final design struggled to stay balanced because of two primary design flaws. The first is that all of our joints are in parallel planes, so it was difficult to compensate for roll and yaw. Second, our center of mass was high relative to the body of the robot, so it took less force to topple it.
We intend to redesign Slaymax to account for these flaws and hope to increase his overall walk speed!