The Problem
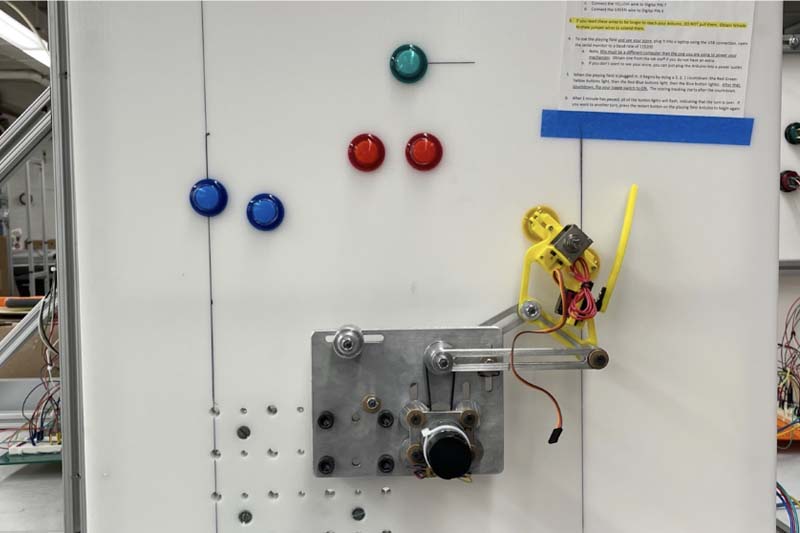
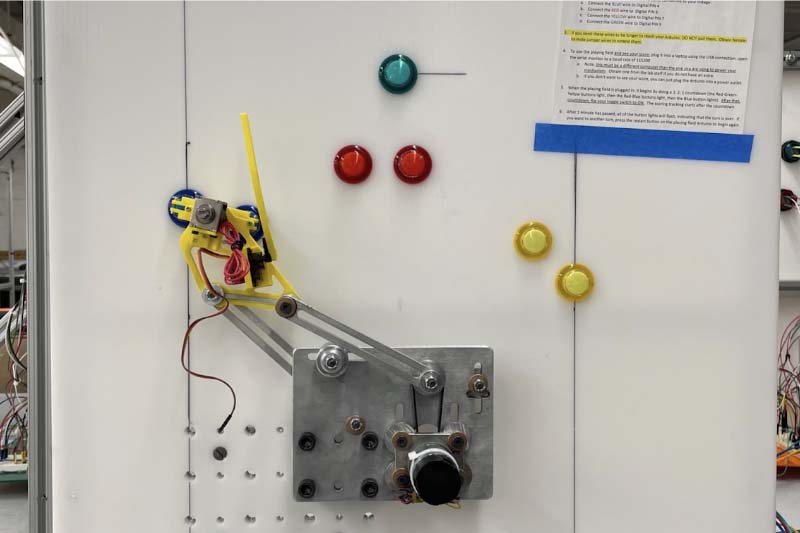
We were tasked with creating a four-bar linkage robot that would press as many flashing buttons on a gameboard as possible in one minute. We were responsible for all calculations, modeling, manufacturing, and programming, with a few constraints (such as motor selection, power, and size).
Our Solution
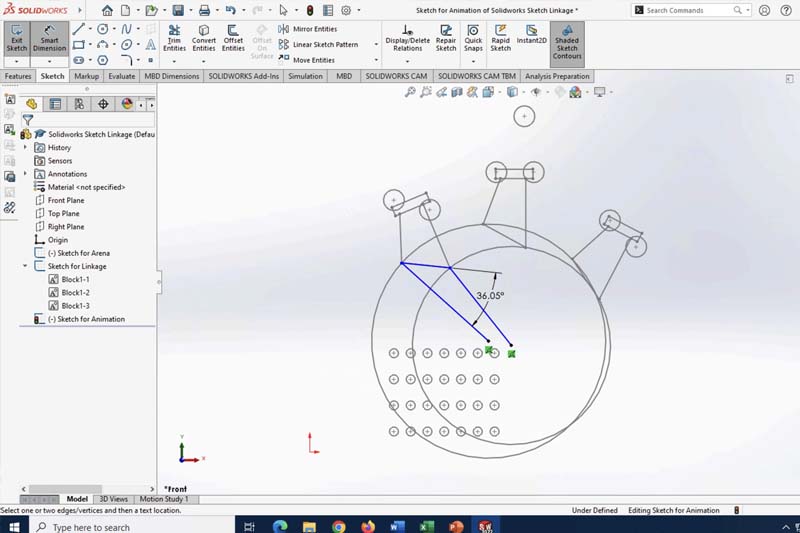
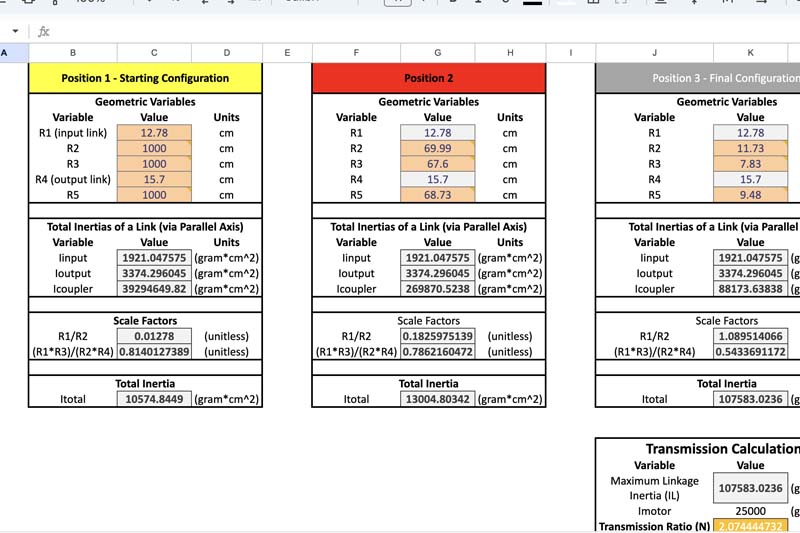
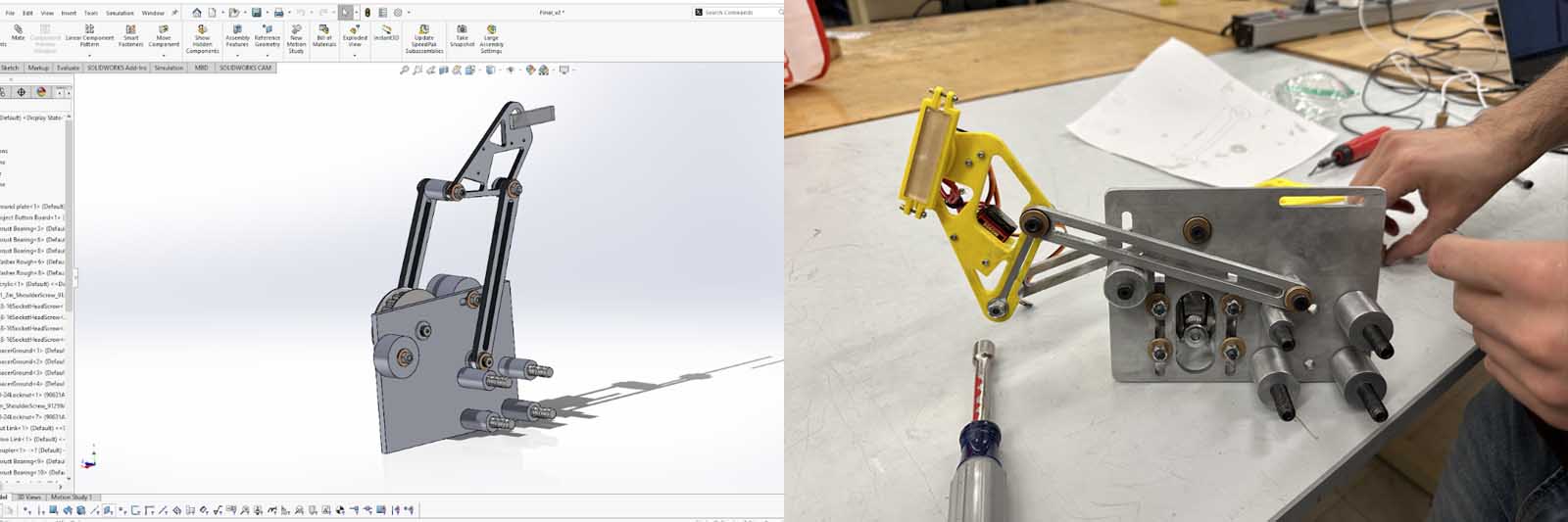
We began by designing a basic coupler and finding linkage lengths with acceptable transmission angles. Then, we made a preliminary CAD assembly with each part. We used the moments of inertia for each part to calculate the necessary transmission ratio for the motor.
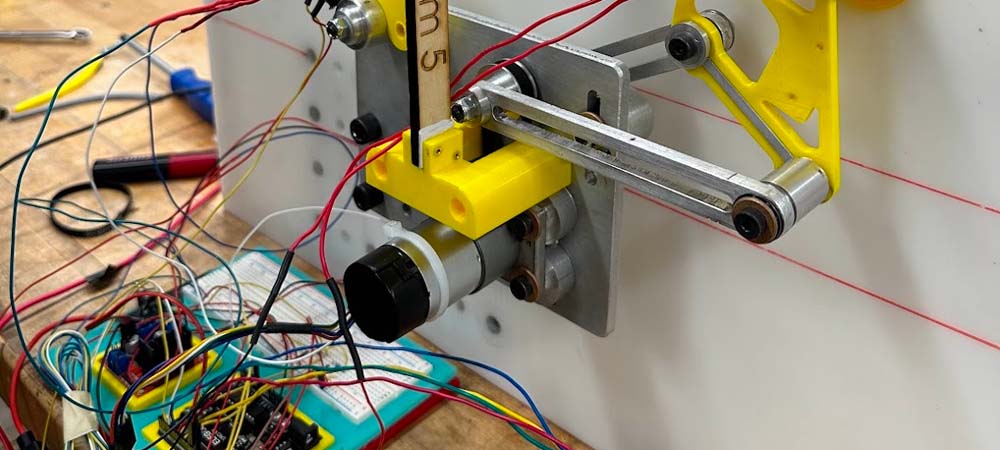
After finalizing each model, we machined the parts out of quarter-inch aluminum.
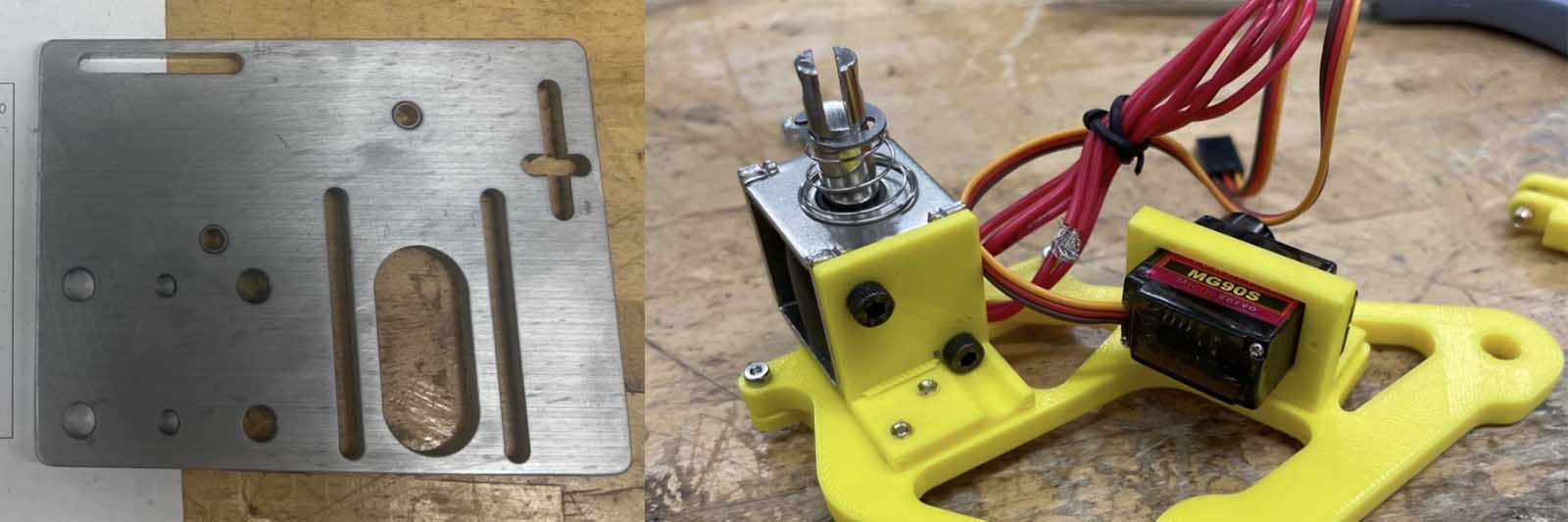
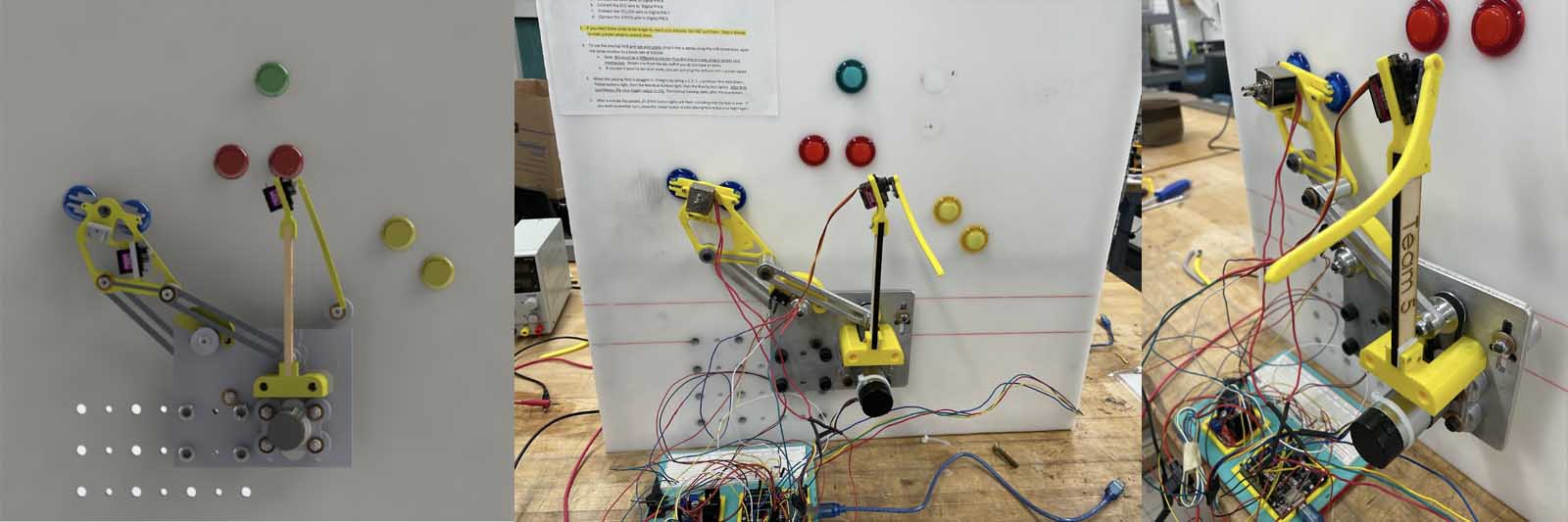
The machine is programmed to read digital inputs from the game board Arduino and respond by providing the appropriate voltage to move the coupler to the correct position and fire the solenoid.
The motion of the machine is dictated by PID control, with the PID constants being found through testing.
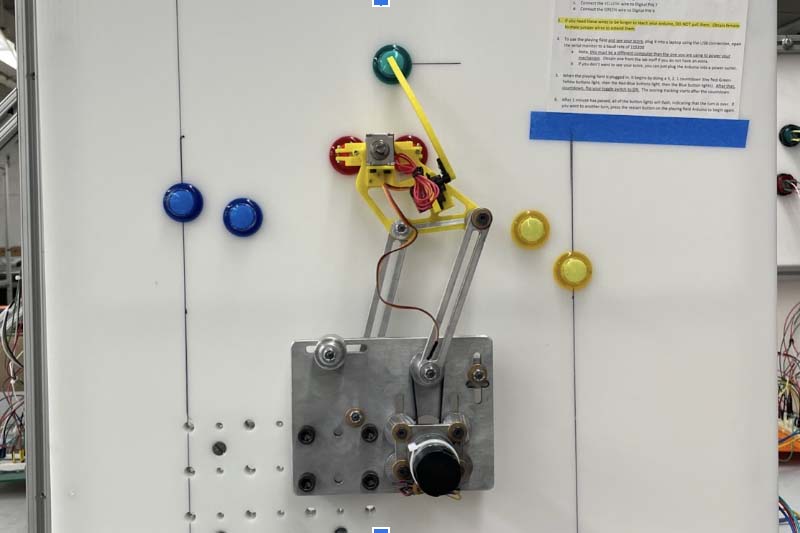
We achieved a final score of 192 button presses per minute! You can view the full video below.
